


 在线咨询
在线咨询 收藏产品 (0 )
收藏产品 (0 )





 400-891-0339
400-891-0339  ceo@opt.tw
ceo@opt.tw 

关注官方微信公众号
订单/资讯随手掌握



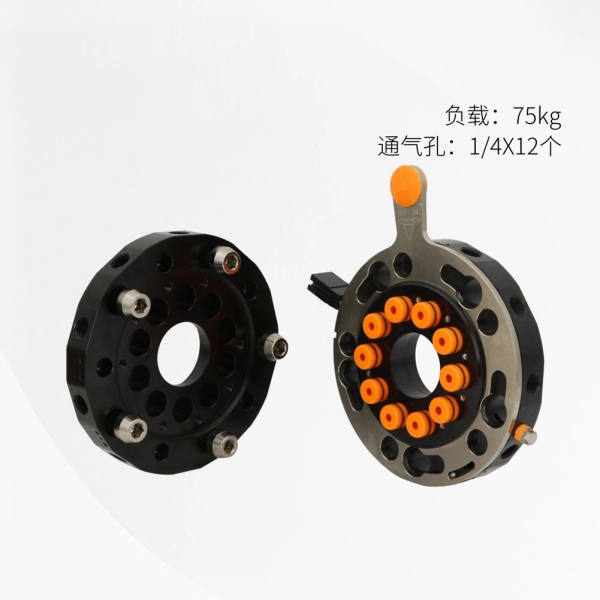
| 本体部分 | 可搬运重量(额定负载) | 10kg | |
| 位置重复精度 | ±0.02mm | ||
| 静态允许力矩 | 弯矩方向 | 100N.m | |
| 扭矩方向 | 60N.m | ||
| 锁紧力(当气压0.49MPa时) | 400N | ||
| 材质 | 本体 | 铝合金 | |
| 锁紧机构部分 | 合金钢 | ||
| 外形尺寸(锁紧状态) | ø90 mmxH34mm | ||
| 产品重量 | 机器人侧 | 0.22kg | |
| 工具侧 | 0.15kg | ||
| 拆装结构 | 卡盘锁紧 | ||
| 拆装动作气压 | 手动式 | ||
| 允许温度与湿度范围 | 0-55℃,0-95%(不结露) | ||
| 通用 | 通气孔 | G1/8x8个 | |
| 组件(选配) | 通用 | 电信号点 | 2Ax9PIN |
备注:由于其潜在的高加速度,机器人可以产生比静态力矩高几倍的动态力矩,动态力矩会在机器人紧急停止下产生,但机器人急停不常发生,为此静态强度证明通常是足够的。
 高品质
高品质
 性价比
性价比
 品类全
品类全
 交期快
交期快
 服务好
服务好
关注官方微信公众号
订单/资讯随手掌握
Copyright © 2026 广东澳普托机器人技术有限公司 版权所有 粤ICP备2026015358号 Design by HIPOIT
宣传内容仅为企业发展愿景与业务规划,不构成任何承诺或行业地位认定,最终解释权归本公司所有。